Conoship
Project context
This project was part of my Industrial Product Design studies. The goal was to develop an efficient solution to transport a welding robot within a specific ship segment at Conoship, ensuring the robot could position itself optimally for precise welding operations.
Approach
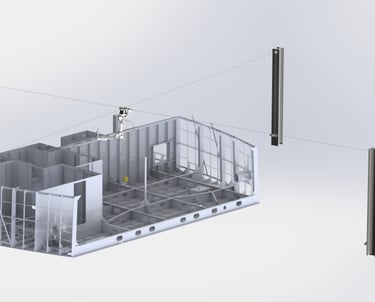
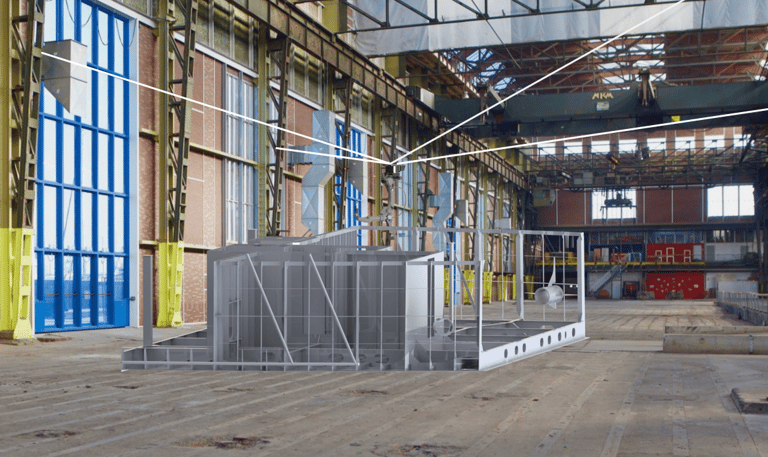
Following the IPO design process, I started with extensive research into the ship’s structure, spatial constraints, and welding requirements. Based on these insights, I developed and tested multiple concepts using CAD modeling, simulations, and physical prototypes.
The main challenge was finding a way to maneuver the robot through tight, irregular ship sections while maintaining stability and accessibility. Through iterative design, I achieved a practical transport solution that balanced mobility, safety, and operational efficiency.
Tools & Techniques
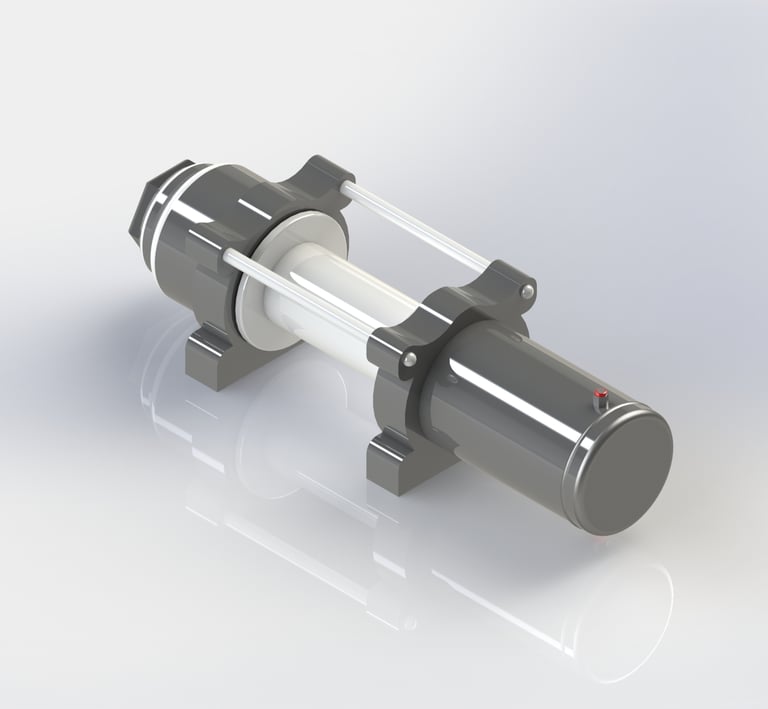
CAD design & simulations
3D printing (functional prototype)
Structural and dynamic calculations
Research and technical documentation
Outcome
Reflection
The final result consisted of a detailed CAD model, physical concept prototype, and a comprehensive advisory report. The project was well received and graded an 8, recognizing the balance between creativity, technical execution, and research depth.
This project significantly strengthened my skills in CAD design, 3D printing, and dynamic calculations. It also deepened my understanding of complex technical systems in industrial environments. If I were to improve the project, I would add more advanced simulation examples within CAD to visualize movement more clearly.
Working on this project sparked my ongoing interest in the technical side of product design and continues to influence how I approach engineering challenges in later projects.
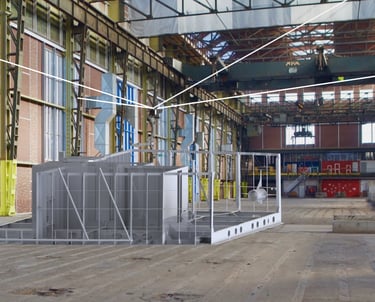
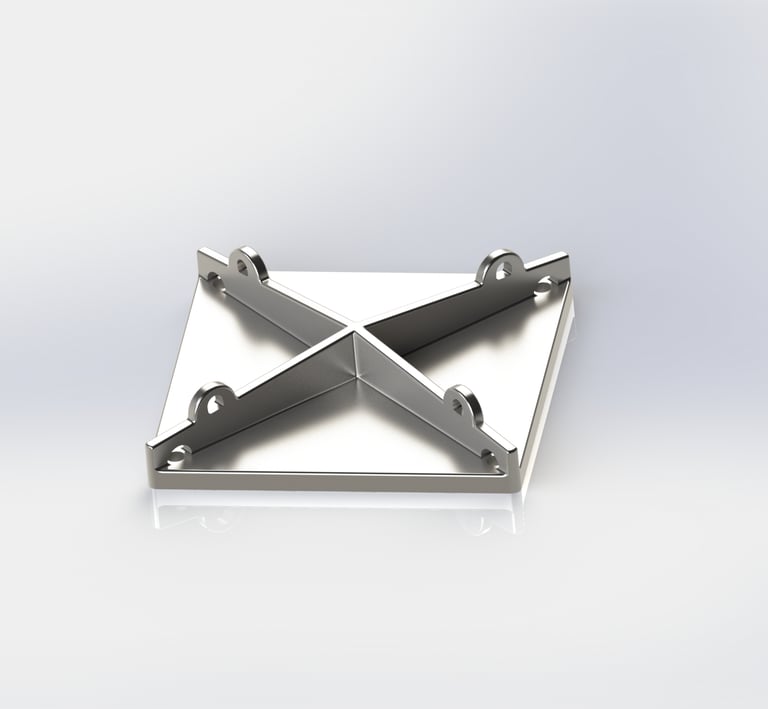
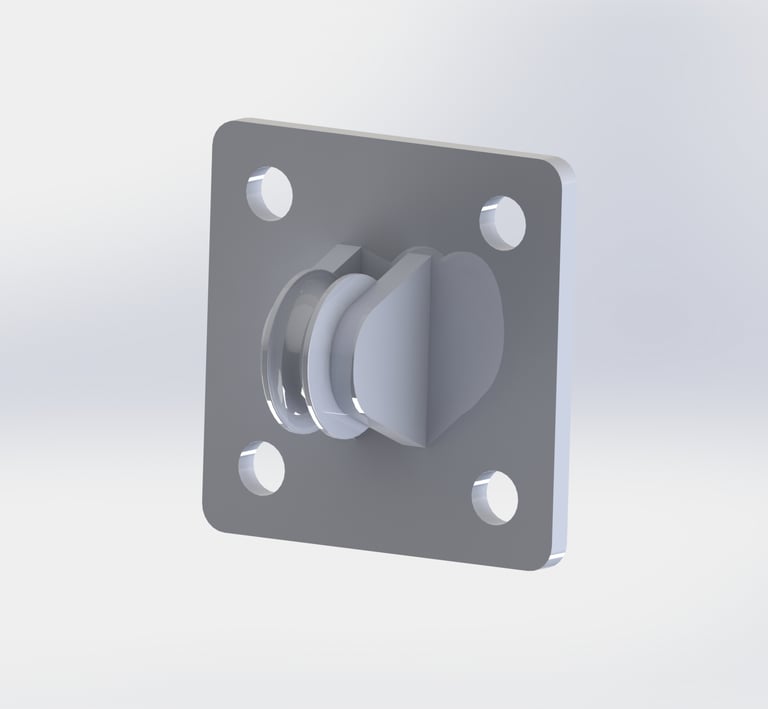
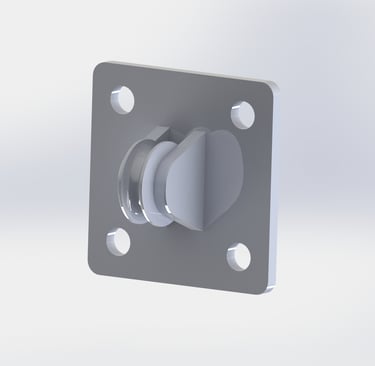
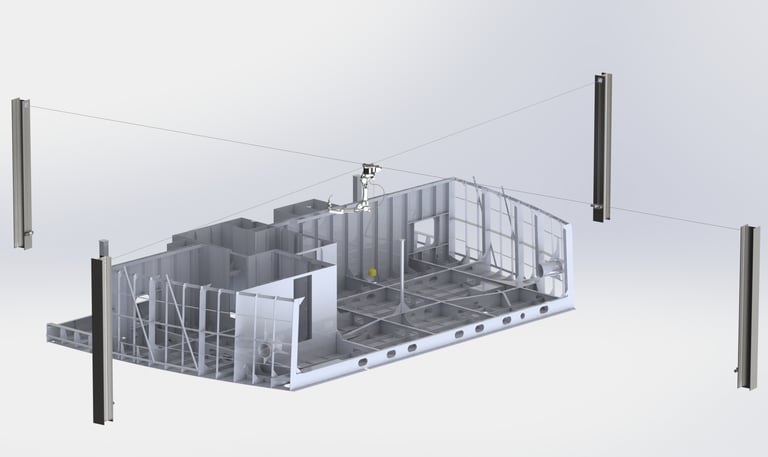
Gallery
A visual impression of the project.